The SCAPE 3D Orientation Control™ enables you to pick parts with 100% accuracy, providing full control over how to handle parts for precision delivery for further processes.

SCAPE 3D Orientation Control™ using a SCAPE Handling Station
SCAPE 3D Orientation Control™ using a SCAPE Handling Station
The gripped part from the bin is placed on a table (SCAPE Handling Station).
Either the SCAPE Grid Scanner (OP13) mounted on a robot or a stationary camera and lamps (SL13) positioned over the table, are used for 3D recognition of the part's position and re-gripping it with high precision. The SCAPE 3D Orientation Control™ (OP11) includes detection of entangled and overlapping parts.
This gives the following advantages:
- Re-gripping the part with high accuracy.
- Switching to a different gripper better suited for placing the part in its final destination.
- Placing the gripper in another position on the part that is better suited for placing the part in its final destination.
- Avoiding the placement of two parts in the final destination.
During bin-picking there is always a slight risk that two parts are gripped at the same time.
The software detects if there is more than one part on the table.
In such instances, the SCAPE Handling Station can reject the parts with a tilt mechanism and throw them back into the bin or a separate box.
SCAPE 3D Orientation Control™ with Artificial Intelligence (AI) Verification

SCAPE 3D Orientation Control™ with AI Verification
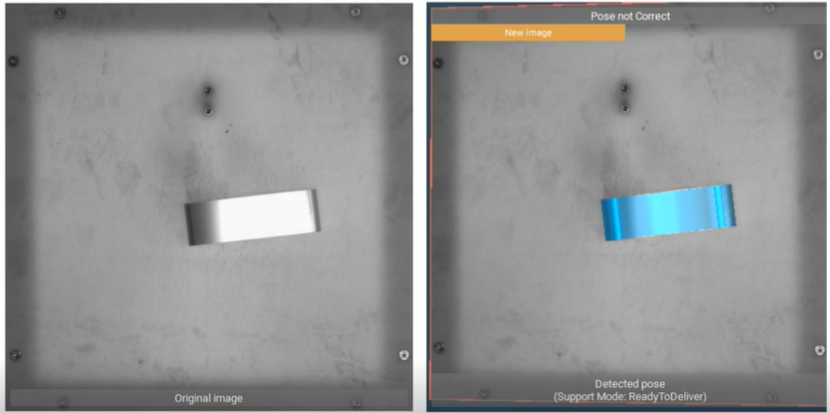
Conventional 2D recognition of parts having similar contours/edges when facing upwards or downwards may challenge the correct detection of parts in the system. This is illustrated in the image below where the recognized part (shown in blue) is upside down compared to the real part.
To enhance the detection of parts in challenging recognition situations the SCAPE 3D Orientation Control™ uses powerful Artificial Intelligence (AI) algorithms.
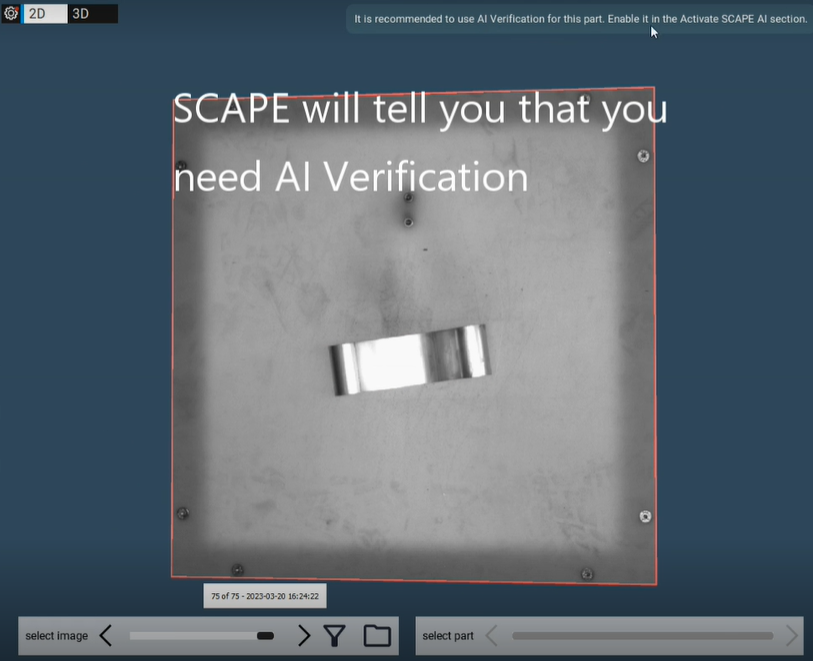
In the SCAPE 3D Orientation Control™ system, the operator will automatically be recommended to use AI Verification when necessary. It is quickly done by enabling the SCAPE AI Verification section in the same software.
The operator will then be guided through a few steps:
1. To set up a verification area for the parts to be detected.
2. Add a minimum of 20 images per support mode (up/down) of the part to be trained in the system.
3. Train the AI Algorithm.
Now the AI Verification will tell which side of the part is facing upwards and let the SCAPE 3D Orientation Control™ system perform recognition with high reliability even for challenging parts.
See the SCAPE 3D Orientation Control™ with powerful Artificial Intelligence (AI) Verification being set up: