NEUES SCAPE BIN-PICKER FEATURE: Hohe Entleerungsgrade mit sehr flachen Teilen
March 16th, 2022
Wie man hohe Entleerungsgrade mit der SCAPE Bin-Picker Lösung für den automatischen Griff in die Kiste erreicht
Eine lange Reihe an Industrien und Fabrikautomatisierungsfirmen bekommen Teile jeden Tag als Schüttgut geliefert und Arbeiter verwenden einen signifikanten Teil ihrer Zeit mit der Handhabung und Vereinzelung der Teile. Diesen manuellen Prozess hat Scape Technologies mit dem zuverlässigen und effektiven SCAPE Bin-Picker gelöst, welche Produktivität erhöhen, Ergonomie verbessern und repetitive, oft gesundheitsschädliche Aufgaben ersetzen.
Automatisiertes Bin-Picking mit Robotern erfordert Software, welche das unerwartete erwartet. Die Lösungen von Scape Technologies beinhalten vielerlei Sicherheits- und Backupprozeduren, welche es den Systemen erlaubt, auch nach unerwarteten Zwischenfällen weiter Teile zu greifen und zuzuführen. Auch wenn Roboter in Behältern Hindernisse vorfinden, kann die Software diese Umgehen und weiter stabile Griffe durchführen. Alles von Schüttgut bis zu strukturiert liegenden Teilen mit Zwischenlagen kann gehandhabt werden, da unsere Software die Komplexität verschiedener Formen und Positionen von Teilen so erkennen und in möglichst wenige Variablen übersetzen kann, sodass Behälter effektiv geleert werden.
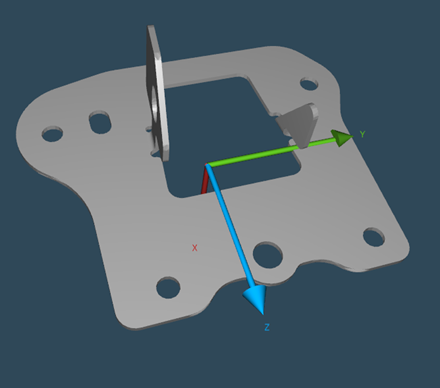
Manche Teile haben wenige oder fast keine tatsächlichen 3D Form, vor allem aus manchen Blickwinkeln. Je weniger dreidimensionale Formen die Teile haben, desto härter ist es, sie in einer 3D Umgebung zu erkennen und von Oberflächen zu unterscheiden. Ein Beispiel ist so ein Winkelstück hier:

Um hohe Entleerungsgrade von Behältern sicherzustellen, verbessern wir unsere Software und Erkennungsalgorithmen stetig und haben jetzt die Erkennung von Teilen mit wenigen oder fast keinen dreidimensionalen Merkmalen stark verbessert.
Herausforderung:
Hohe Entleerungsgrade mit sehr flachen Teilen
Sehr flache Teile mit nur sehr wenigen dreidimensionalen Formen können je nach Lage nur sehr schwer in 3D Punktewolken von z.B. Behälterwänden oder Böden unterschieden werden.
Hier ist ein weiteres Beispiel eines solchen Teils:
Wenn man die Oberfläche des virtuellen Teils mit der gescannten 3D Umgebung abgleicht, kann es manchmal zu Erkennungen wie dieser kommen:
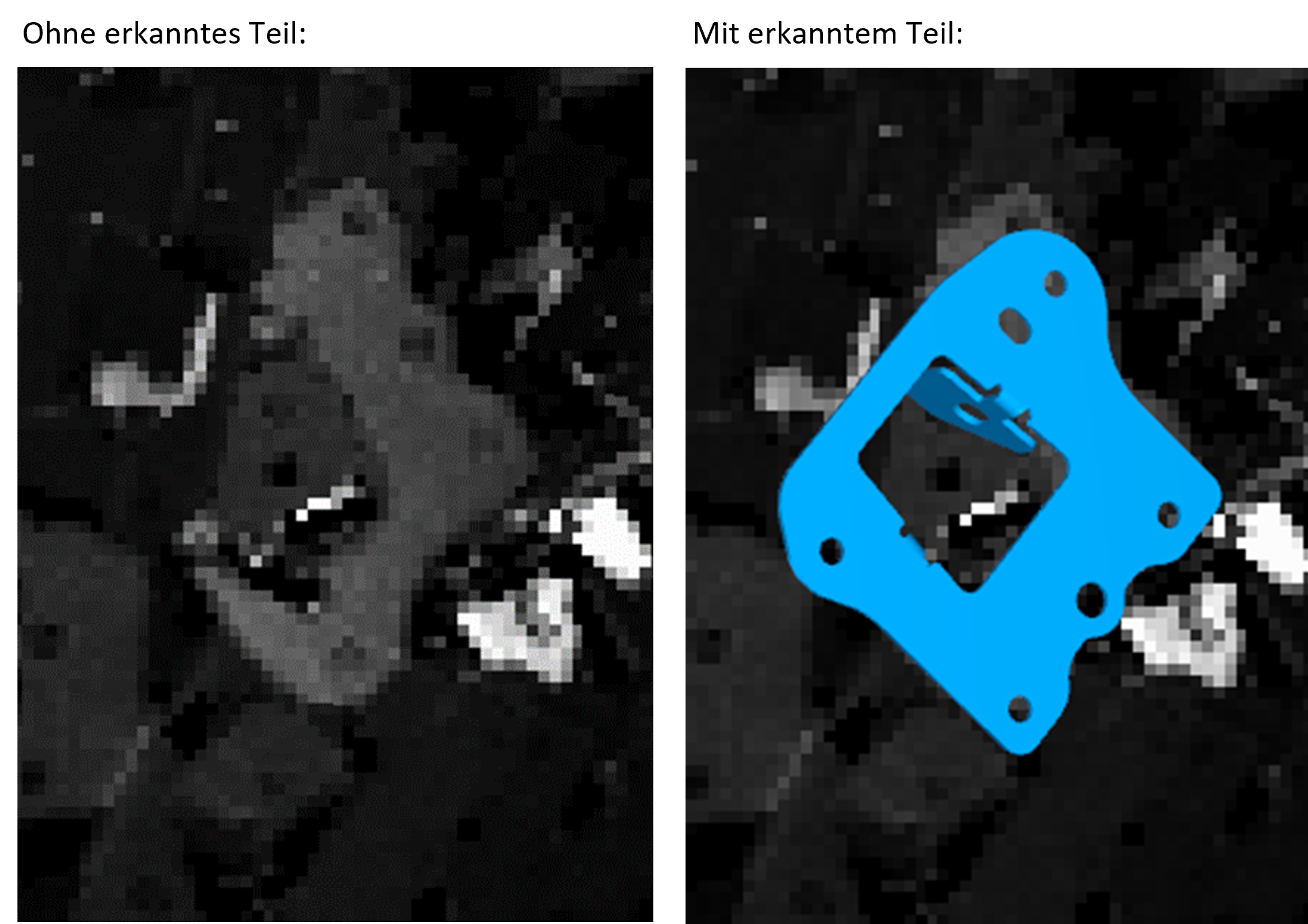
Das Teil wird teilweise von einem anderen Teil verdeckt und in der Erkennung passt zwar die Oberfläche des Teils zur Fläche im Scan, das Teil wird aber in einer falschen Orientierung erkannt.
Lösung:
Nutzung von 3D Kanten von Teilen für die Erkennung
Um solche Erkennungen zu verbessern, werden in unserem Algorithmus nun 3D Kanten des Teils speziell mit einbezogen. Vom CAD-Modell des Teils werden diese Kanten extrahiert:
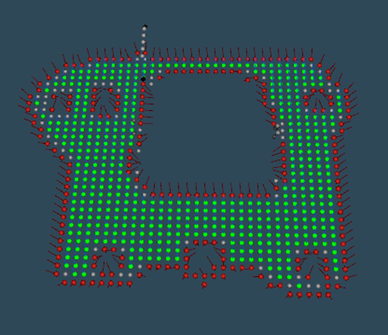
Diese werden dann mit den Kanten der Flächen in der 3D Umgebung verglichen.
Das Ergebnis:
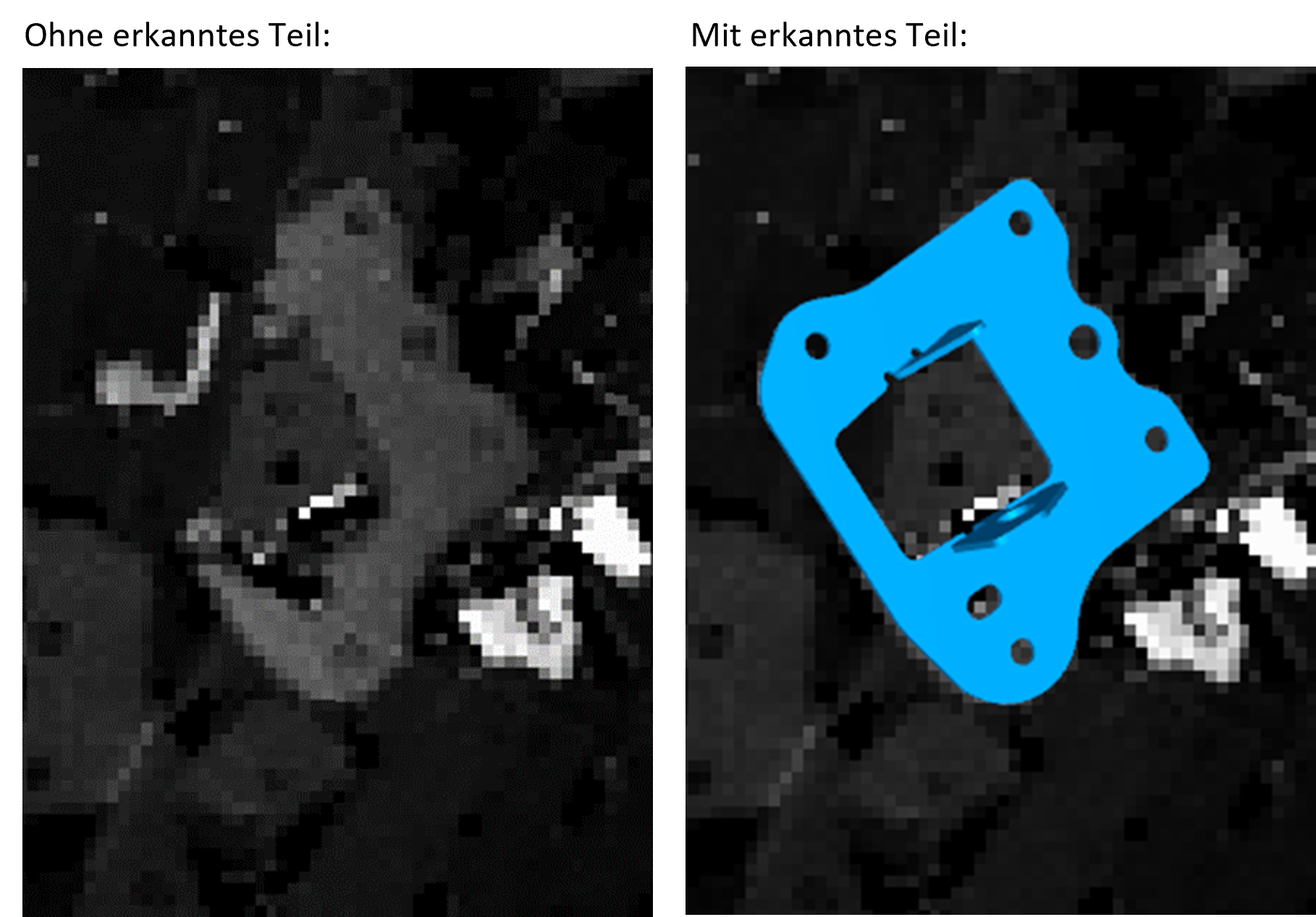
Das vorige Teil wird nun richtig erkannt, da die Kanten der Löcher und der Oberfläche besser mit der 3D Umgebung abgeglichen werden:
Bonus:
3D Kanten haben einen weiteren Vorteil, den sie verhindern auch flache Erkennungen auf einem fast flachen Hintergrund: Wenn ein zuvor gegriffenes Teil z.B. auf einem Kartonboden einen Abdruck hinterlässt, kann dies zu 3D Daten führen, welche zu den Daten eines Teil passen und es kommt so manchmal zu falschen Erkennung auf dem Karton.
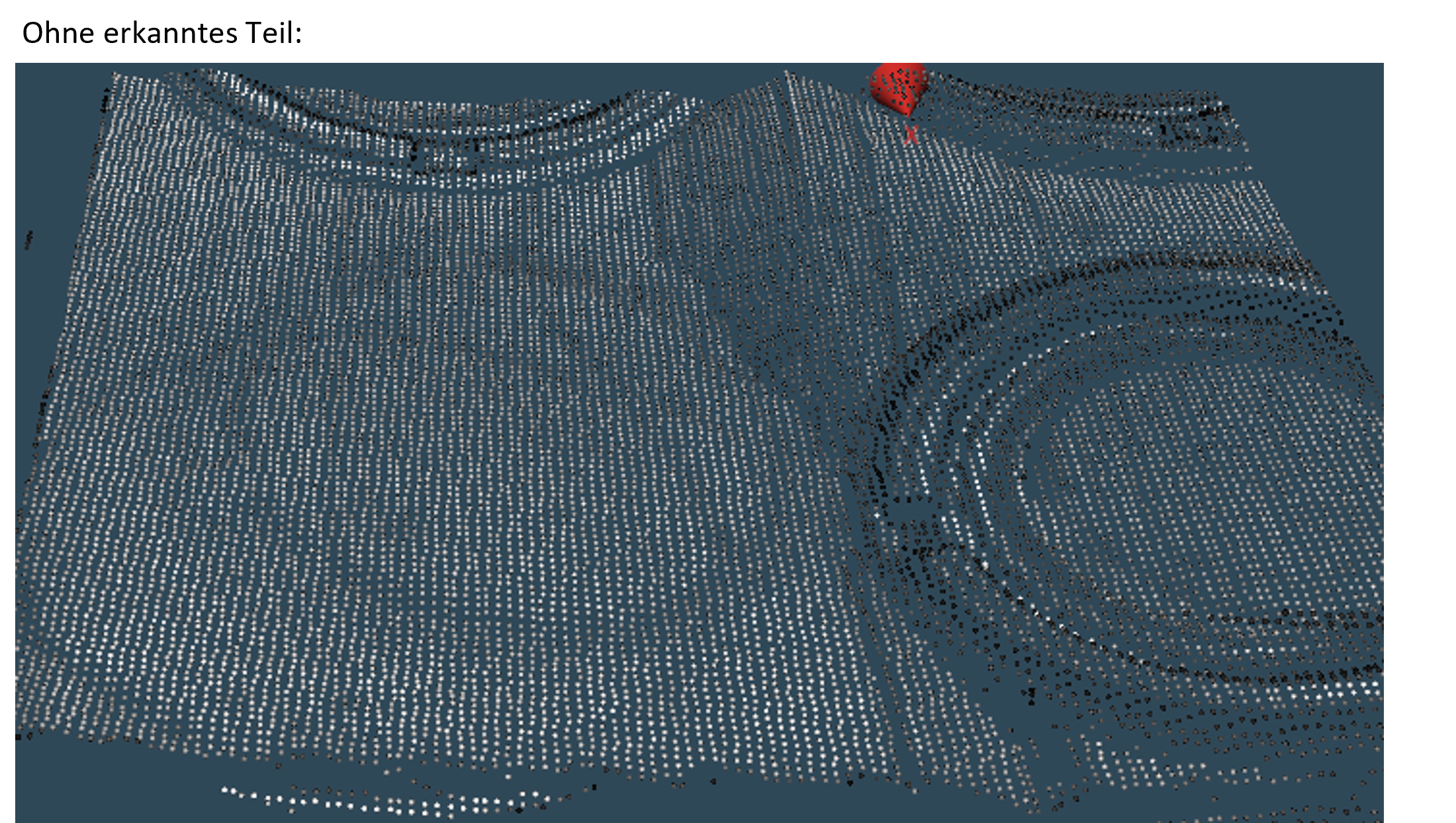
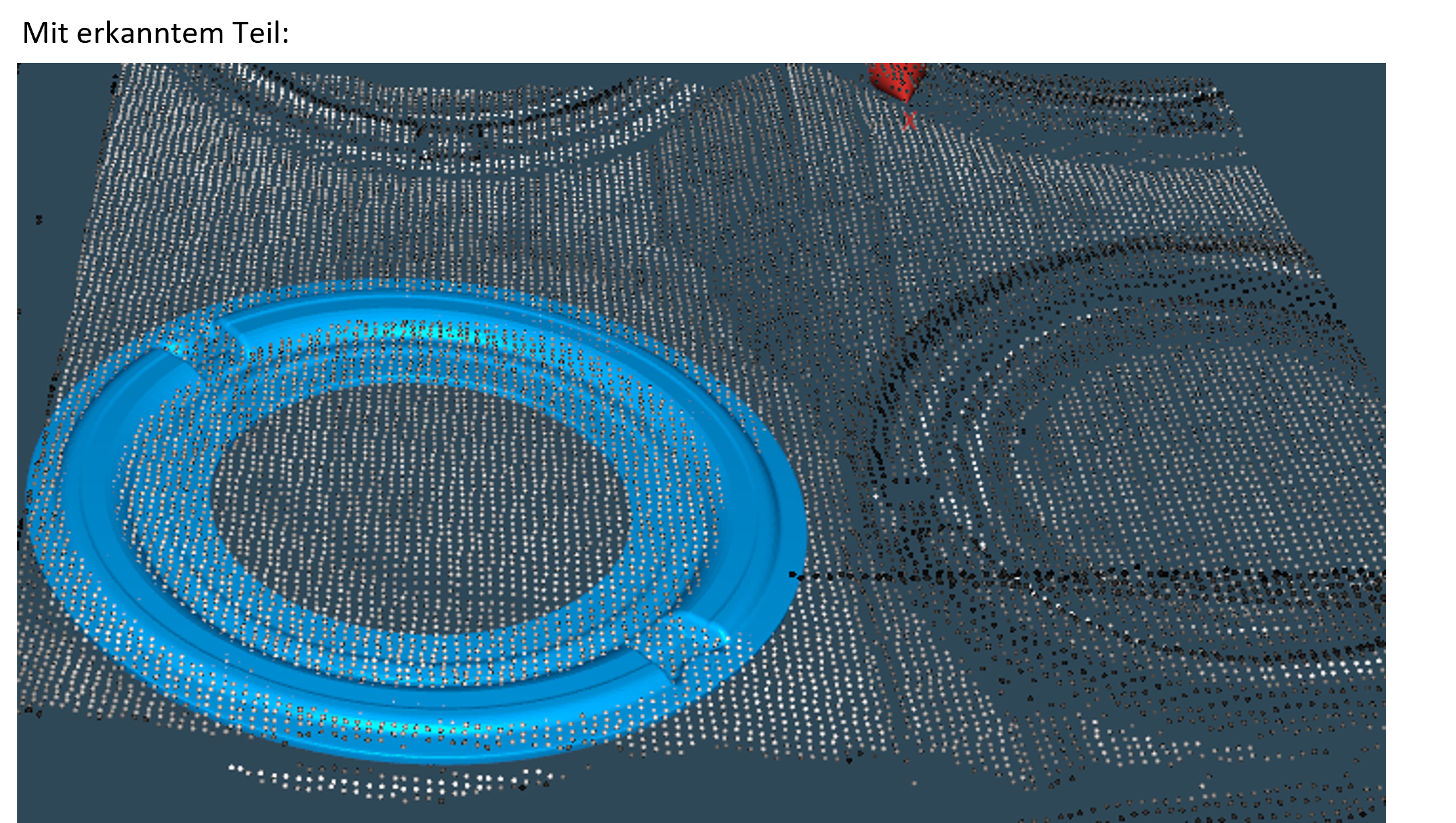
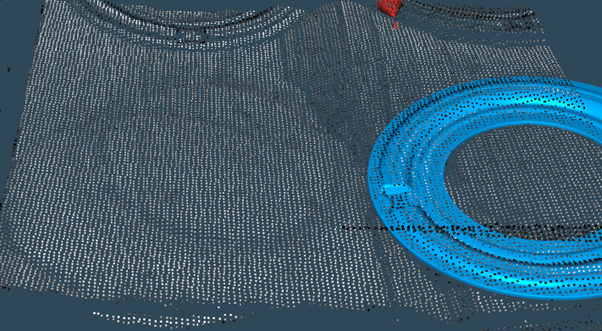
Aber nach der Einführung von 3D Kanten, werden solche Erkennungen gefiltert, da der Karton nicht genug Kanten vorweist, welche auf das CAD-Modell passen. Stattdessen wird als erstes das benachbarte Teil korrekt erkannt:
Fazit:
Durch die Nutzung von 3D Kanten wurde die Performance von SCAPE Bin-Picking Systemen signifikant verbessert, da vor allem flache Teile nun öfter direkt in der richtigen Orientierung erkannt werden und es so zu weniger fehlgeschlagenen Griffen kommt, was wiederum durchschnittliche Taktzeiten verbessert. Zudem werden höhere Entleerungsgrade erreicht, da auch Teile auf dem Behälterboden besser erkannt werden, ohne die Stabilität und Sicherheit der Systeme zu beeinträchtigen, was zu kürzeren Umstellungszeiten führt.