SCAPE 3D Object Recognition™
SW10-05

Die SCAPE 3D Object Recognition Software
SCAPE 3D Object Recognition kann Objekte in Echtzeit erkennen, egal wo sie sich im Sichtfeld des Scanners befinden. Es funktioniert sowohl mit am Roboter montierten als auch mit stationären Scannern.
Scape 3D Object Recognition Ermöglicht Neue Anwendungen
- Erkennung der Vorrichtungsposition: Bevor Teile platziert werden, können die Vorrichtungen jetzt genau identifiziert werden, um eine makellose Teileplatzierung sicherzustellen.
- Erkennung der Objektposition und -orientierung: SCAPE 3D Object Recognition zeichnet sich durch die präzise Identifizierung der Positionen und Orientierungen von Objekten aus.
Standortüberprüfung: SCAPE 3D Object Recognition kann die Anwesenheit von Vorrichtungen oder Teilen an bestimmten Stellen bestätigen.
Verschiedene Anwendungen von SCAPE 3D Object Recognition
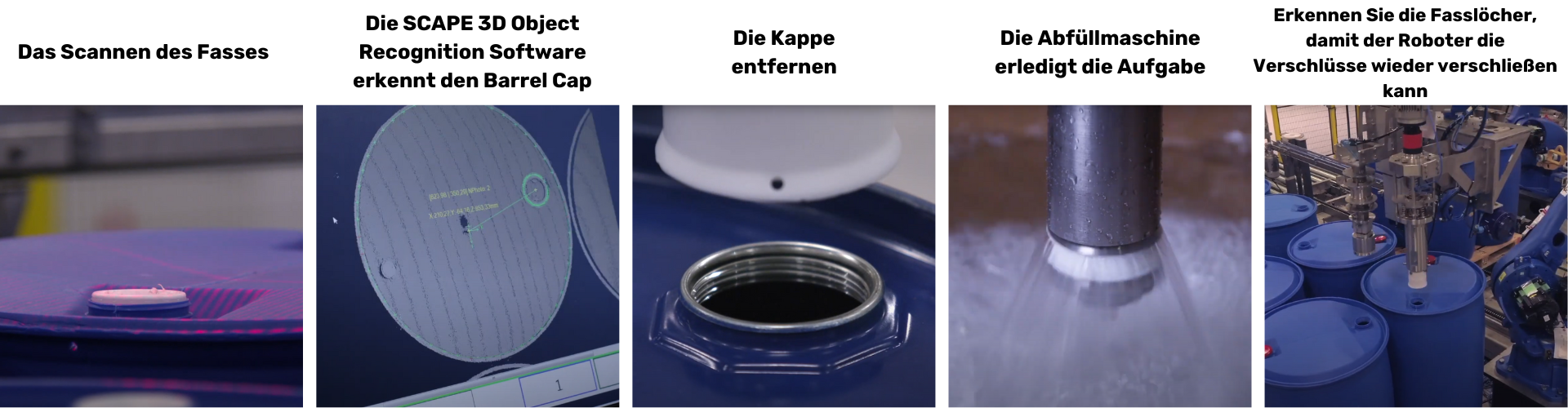
Erkennung von Verschlusskappe des Fasses
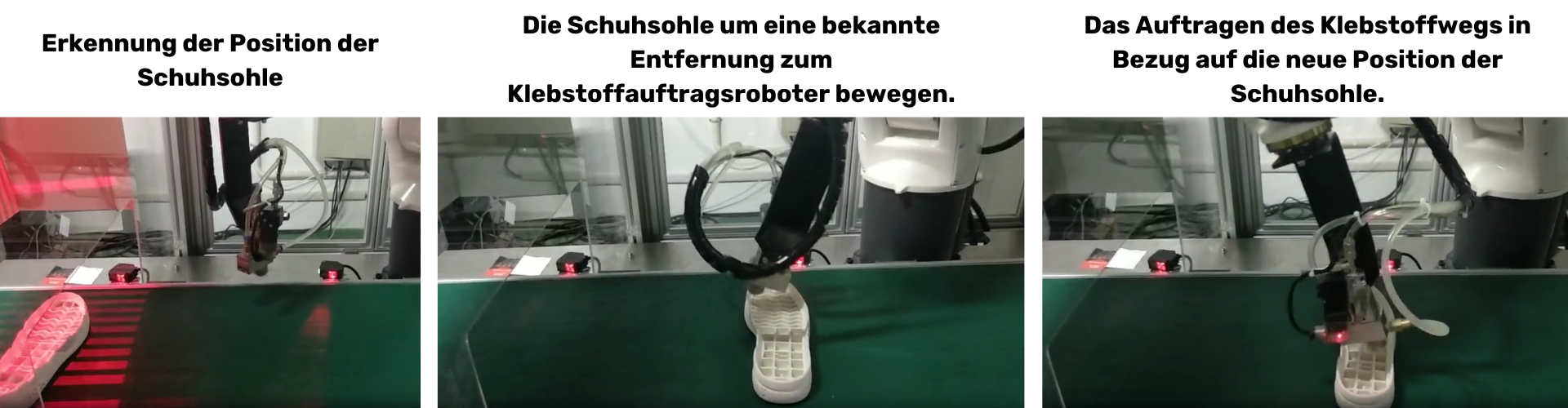
Erkennung von Schuhsohlen
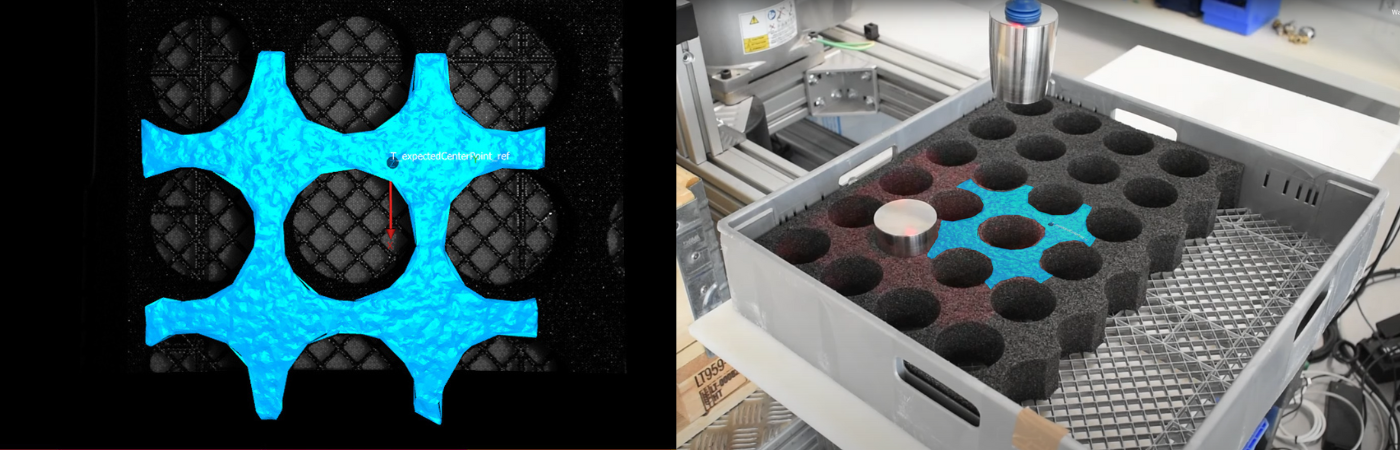
Erkennung von Vorrichtungen
Dies sind nur einige Beispiele von vielen potenziellen Anwendungen, die durch SCAPE 3D Object Recognition ermöglicht werden. Die Vielseitigkeit dieser Software, mit ihrer Fähigkeit, jegliche 3D-Daten im Sichtfeld des Scanners zu erkennen, ermöglicht es Industrien in verschiedenen Bereichen, ihre Prozesse zu innovieren und zu optimieren.
Um die transformative Kraft von SCAPE 3D Object Recognition zu nutzen, benötigen Benutzer einen der SCAPE 3D Vision Sensoren.
Hier ist ein Beispielvideo, in dem der SCAPE Grid Scanner genutzt wird, um Teile nach dem Bin-Picking präzise in einen undefiniert platzierten Korb zu legen:
Hinweis: Diese Option beinhaltet keine direkte Robotersteuerung; stattdessen liefert sie dem Roboter die wichtigen Informationen zum erkannten Objektrahmen, was präzise Manipulation und Entscheidungsfindung ermöglicht.